Key Takeaways:

In our search for life beyond Earth, the ocean worlds — icy moons with deep seas — have become primary targets. But these exotic moons have one problem: Their oceans, which astrobiologists think may host life, are trapped beneath miles of solid ice. So how can we explore these alien seas through such a daunting, frosty barrier?
Enter cryobots, probes designed to melt or dig through the icy crusts of ocean moons. Cryobots have been under study for more than a decade. But now, as part of the Innovative Advanced Concepts (NIAC) program, NASA has awarded $600,000 in phase II funding to investigate new approaches for searching for extraterrestrial oceanic life. The hope is that the funding will help scientists eventually deploy swarms of tiny swimming robots into the oceans of moons like Europa and Enceladus.
Robotic exploration of alien seas
Sending an armada of micro-robots, each the size of a cell phone, is the brainchild of microrobotics expert Ethan Schaler and his colleagues at JPL and the Georgia Institute of Technology. The approach is known as Sensing With Independent Micro-swimmers, or SWIM.
“SWIM is seen as the next step in cryobotic missions, because now cryobots are seen as a viable solution for doing ocean-access missions,” Schaler tells Astronomy. “We wanted to see what happens once you hit that ocean — what is the best way to explore it?”
Most cryobots are designed to bore or melt through many miles of solid ice, eventually delivering a science package to the sea underneath. But their streamlined, columnar profile leaves little room for science payloads and limits their mobility. “If we want to explore at a distance from our entry point, we need a more capable swimming robot,” Schaler says.

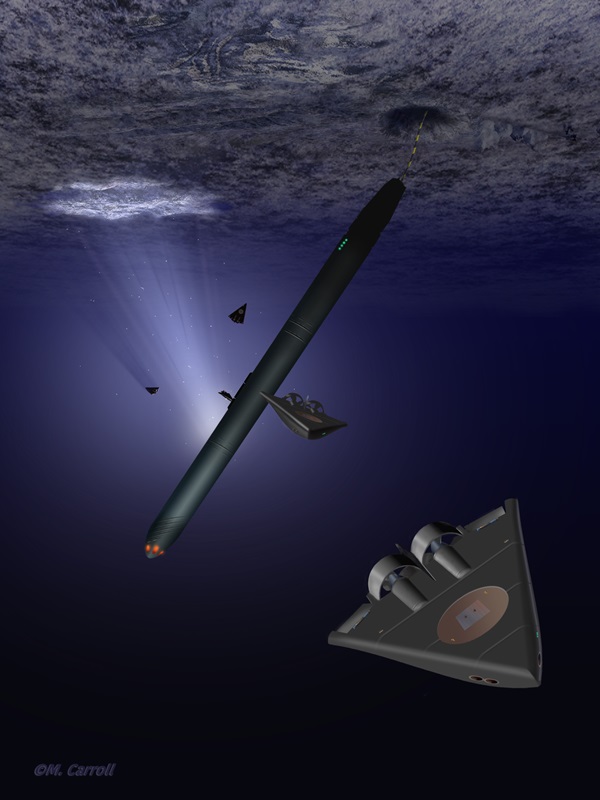
The Sensing With Independent Micro-Swimmers (SWIM) concept, illustrated here, relies on dozens of tiny, swimming subs (center) that are deployed in a subsurface ocean after a cryobot (left) burrows through the icy shell of a distant moon.
Fortunately, engineers have come up with a solution: deploy dozens of these tiny submarines. Schaler and his team brainstormed a number of different ideas. “We looked at slightly larger tethered robots,” he says. “We also looked at passive floating sensor pods that you could deploy into the currents. We looked at a tethered chain of sensor nodes — basically a long kite with steerable elements to give you some mobility to steer in the downstream current. What we finally settled on were fully untethered, cell-phone-sized swimming robots.”
Without a tether, there is no danger of multiple robots getting tangled. And with multiple robots, engineers can start exploring some interesting behaviors: The swimming robots can flock together in a swarm or avoid one another and spread out to more efficiently map the surrounding environment.
The delta-winged robotic subs would be arranged in the cryobot like overlapping pie slices. Schaler projects that 48 of the explorers could packed into a single cylindrical cryobot. This packing plan is important because it means the miniature submarines could all fit within a space designed for one science instrument — notionally, a 5-liter space, or some 0.2 cubic feet.
If a cryobot is designed to carry three or four science experiments, 48 microswimmers would take up only one experiment’s worth of space. Each craft would have a lifetime of roughly 1.5 to 3 hours, enough time to chart physical or chemical gradients in the water column, as well as measure the region’s salinity, temperature, and even search for signs of active life. The small subs would be deployed a few at a time to investigate ocean dynamics at different times of day and night. In the search for life, variations that follow the day/night cycle can serve as strong biomarkers, or clues to the presence of life.
The funding recently announced by NASA will enable Schaler’s team to actually build preliminary versions of the microbot submarines for testing in frigid marine regions on Earth.
From science fiction to science fact
Deploying an extraterrestrial armada has exciting potential in our exploration of ocean worlds like Europa or Enceladus. But the miniature swimmers first have to get down into these moons’ oceans. Fortunately, many designers feel that cryobot concepts and technology have finally matured to a practical level.
“We used to have magic steps,” says JPL’s Samuel Howell, a member of the Europa Clipper mission and a cryobot expert. “In other words, we’d wave our hands and say that, at this step, a new invention — or as-yet uninvented technology — is needed for certain things. But we no longer think in terms of magic steps.”
As an astrobiologist, Howell is excited by such advances. “We’re getting to a place both scientifically and technologically where we’re capable of the direct in-situ search for life in a planetary ocean using technologies like cryobots.”
In fact, Howell is about to find out just how far that technology has come. He is the Principal Investigator of the NASA-funded ORCAA Project, which will conduct an analog science mission to Europa by accessing a subglacial lake in the Juneau Ice Field with a planetary cryobot.
Cryobot approaches to boring through the ice range from jets of hot water to cutting or drilling tools to heating elements. While the subglacial lakes of the Juneau Ice Field lie 0.6 miles (1 kilometer) below the surface, Europa’s seas are likely 10 to 15 miles (15 to 25 km) beneath the ice. Any cryobot would require several years of melting before arriving at the subsurface sea. And there are other challenges, too, Howell says.
“These environments are so unknown that a lot of these design concepts end up like Swiss Army knives: You have melting and cutting and jetting, radio relays and acoustic relays; it’s a long journey. You have to make sure you’ve got all the tools you need with you.”
As a cyrobot travels through the icy crust, it would carry out scientific investigations of the ice around it. For example, diamond or sapphire windows would allow optical instruments to observe and analyze the surrounding high-pressure environment. And the craft could even collect water to examine it for different particulates that might serve as biosignatures.
Investigating the sea of a distant moon presents some of the greatest challenges to spacecraft engineering in history — but the potential rewards are great, too.
“It’s a hugely involved and ambitious goal,” says Howell. “From my own perspective, I almost feel like there’s a compulsion that if we are capable of doing this, then we must do it. It’s a civilization-scale goal.”