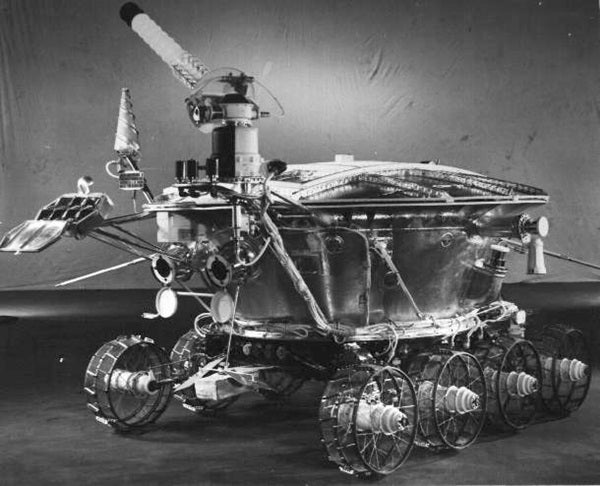
The Soviet Union developed a rover design called Lunokhod (“Moonwalker”). This was a solar-powered, unmanned rover with eight independently suspended and powered wheels. Operators on Earth could drive it remotely, despite the three-second round-trip signal delay, by using a “front windshield” provided by TV cameras that sent still images every few seconds.
Two Lunokhods launched to the Moon successfully, and the multiwheel design proved capable of driving over terrain with craters, rocks, and soft soil. Lunokhod 1 (active November 1970 to September 1971) drove a total of 6.5 miles (10.5 kilometers); Lunokhod 2 (January to June 1973) traveled 23 miles (37km).
When NASA engineers designed its small Sojourner rover for the Mars Pathfinder mission (1996–97), they studied several configurations before adopting a variation of the Lunokhod system. Sojourner had six separately powered wheels; the three on each side being linked by rocker arms. (An arm linked two wheels, and that pair was linked by a second arm to the third wheel.) Although the rover was the size of a microwave oven, and its wheels just 5 inches (12 centimeters) in diameter, the rover drove a total of 100 yards (meters) over rough and rocky terrain in Ares Vallis.
When it came time to design the Mars Exploration Rovers, Jet Propulsion Laboratory engineers copied Sojourner’s suspension system for Spirit and Opportunity, scaling up the wheels to 10 inches (25cm) in diameter. And NASA’s next Mars rover, the Mars Science Laboratory (named Curiosity), is about the size of Mini Cooper car. It uses the same suspension system, with steerable wheels scaled up yet again, to 18 inches (46cm) in diameter.
Top speed for Curiosity, however, is about 100 feet (30 meters) per hour, or about the same as Spirit and Opportunity.