Editor’s note: This is an expanded version of a previously published story.
When you hear the words Mars rover, you probably picture one of the modern rovers like Perseverance or Curiosity: camera-covered, laser-toting, nuclear-powered monster trucks with wheels the size of barrels, trundling across Mars with all the urgency of a Jawa sandcrawler to study rocks and dust. Or, if you’re a little older, you might imagine their predecessors: the smaller, solar-powered twins Spirit and Opportunity, which raced across Barsoom like Labrador puppies on a beach, hopscotching from crater to crater and traversing more hills than the Grand Old Duke of York.
But none of those would have been built if it weren’t for the amazing success of a much smaller, much less sophisticated rover named Sojourner, which landed on Mars 26 years ago. Not much bigger than a microwave, it weathered a daring landing cocooned in airbags — a dramatic and risky departure from the retro rockets the Viking landers had used to touch down on the Red Planet two decades earlier.
Sojourner didn’t just survive on Mars; it thrived, carrying out useful science and sending back fascinating pictures long past the expected end of its mission. Sojourner forged the path for the high-tech rovers currently rolling across Mars in the same way that the Wright Flyer opened the door for the fighter jets and airliners soaring through Earth’s skies today.
Sojourner’s story
Newer space enthusiasts might be most familiar with Sojourner thanks to the rover’s cameo in the 2015 film The Martian. Although the way the rover followed Mark Watney around the hab like a pet dog was about as realistic as the film’s dust storm, it was admittedly sweet and just one of many things I forgive that film for.
But what is the real story of Sojourner? Launched Dec. 4, 1996, aboard a Delta II rocket, Sojourner was part of the Mars Pathfinder mission: a low-budget program to send a lander and a small test rover to Mars to see if it was even possible to operate a wheeled vehicle there.
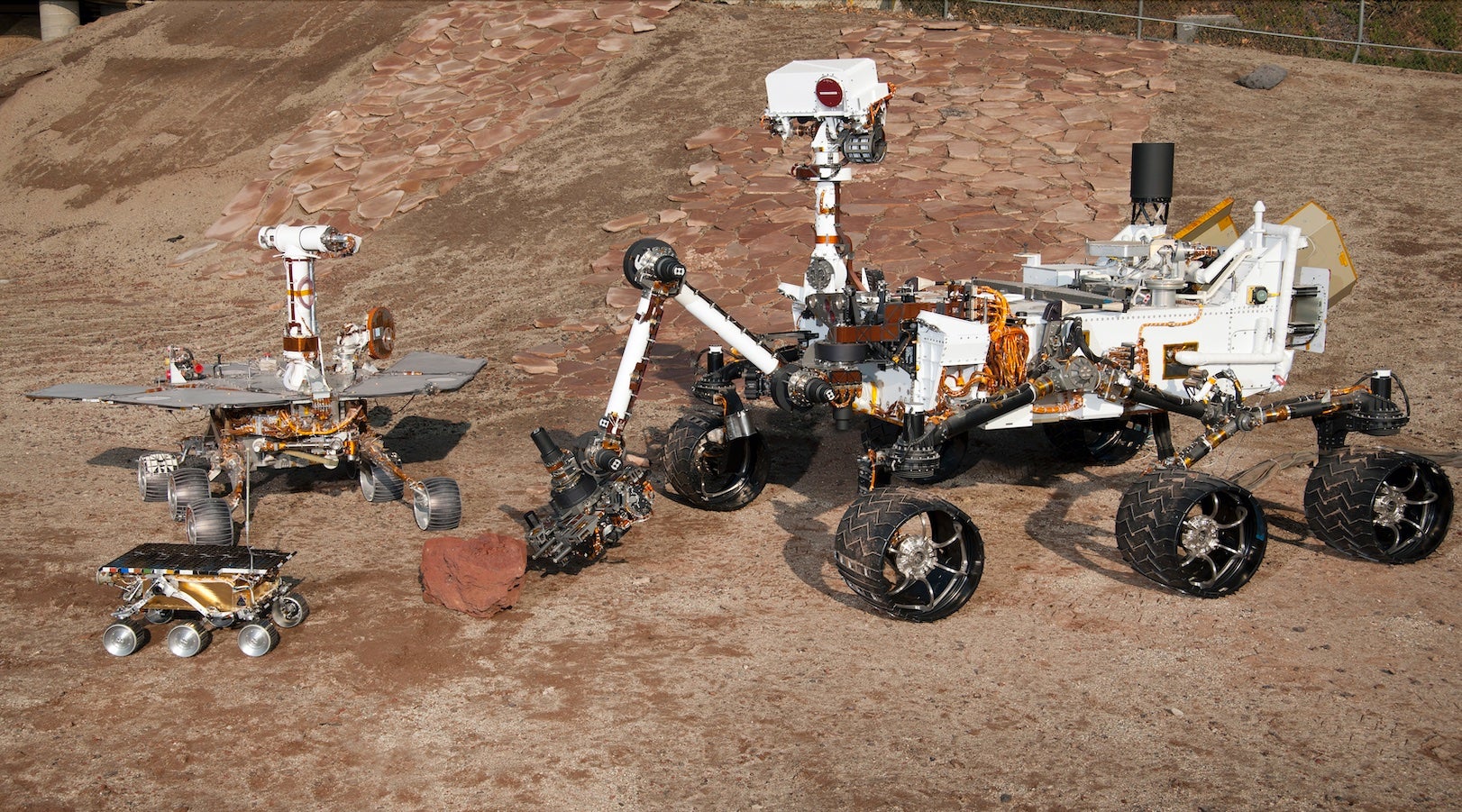
And Sojourner certainly was small. Weighing only 34 pounds (15.6 kilograms) and measuring just a foot (30 centimeters) high and 2 feet (65 cm) long, it could fit easily on a kitchen counter. But despite its diminutive stature, little Sojourner had big goals.
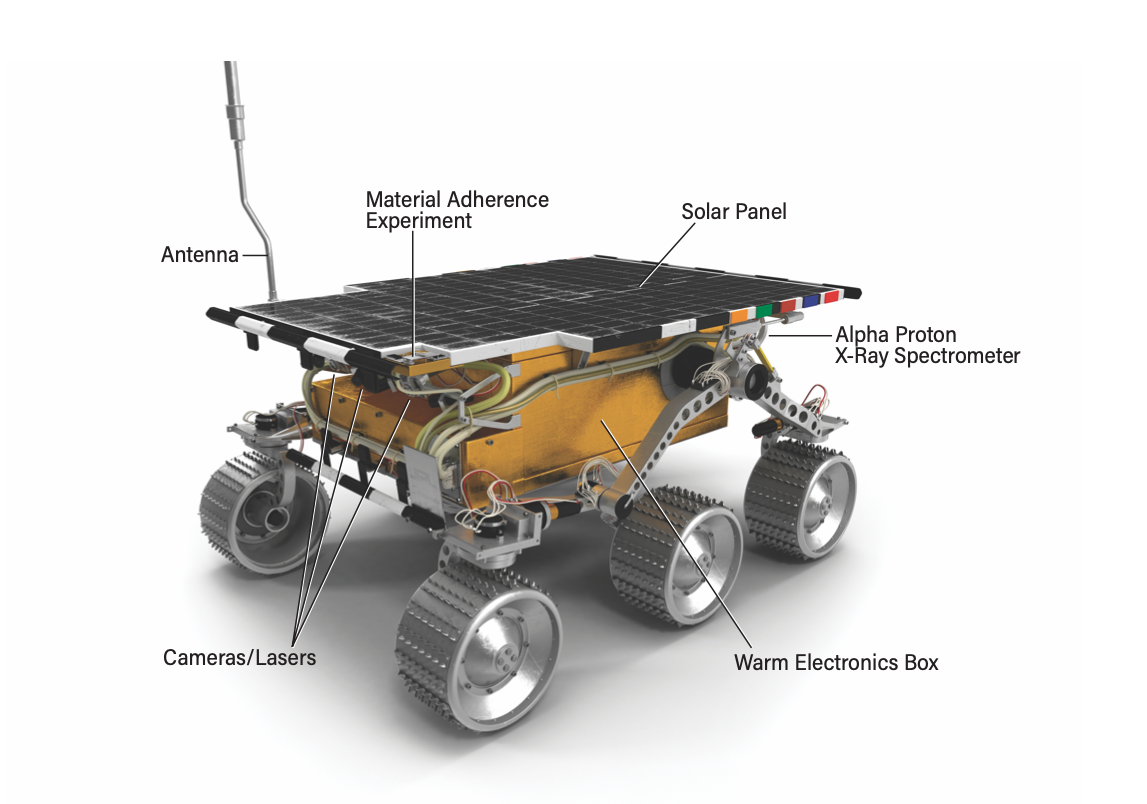
It came equipped with front and rear cameras and a variety of instruments designed to perform limited but valuable science. The Alpha Proton X-Ray Spectrometer (APXS) was its principal scientific tool. It included three different spectrometers and helped scientists analyze the rocks and dust that the rover encountered. The APXS sensor head was mounted on a small robotic arm that reached out and pressed the sensors against the martian rocks or soil, like a dog pressing its nose to the ground to better smell the scents embedded within.
A pair of forward-facing Kodak KAI-0371 monochrome cameras acted as the rover’s eyes, studying the local topography and recording maps of the surface in black and white. The lovely color images that Sojourner sent back — and is most famous for — were taken by a single KAI-037M sensor in the rear.
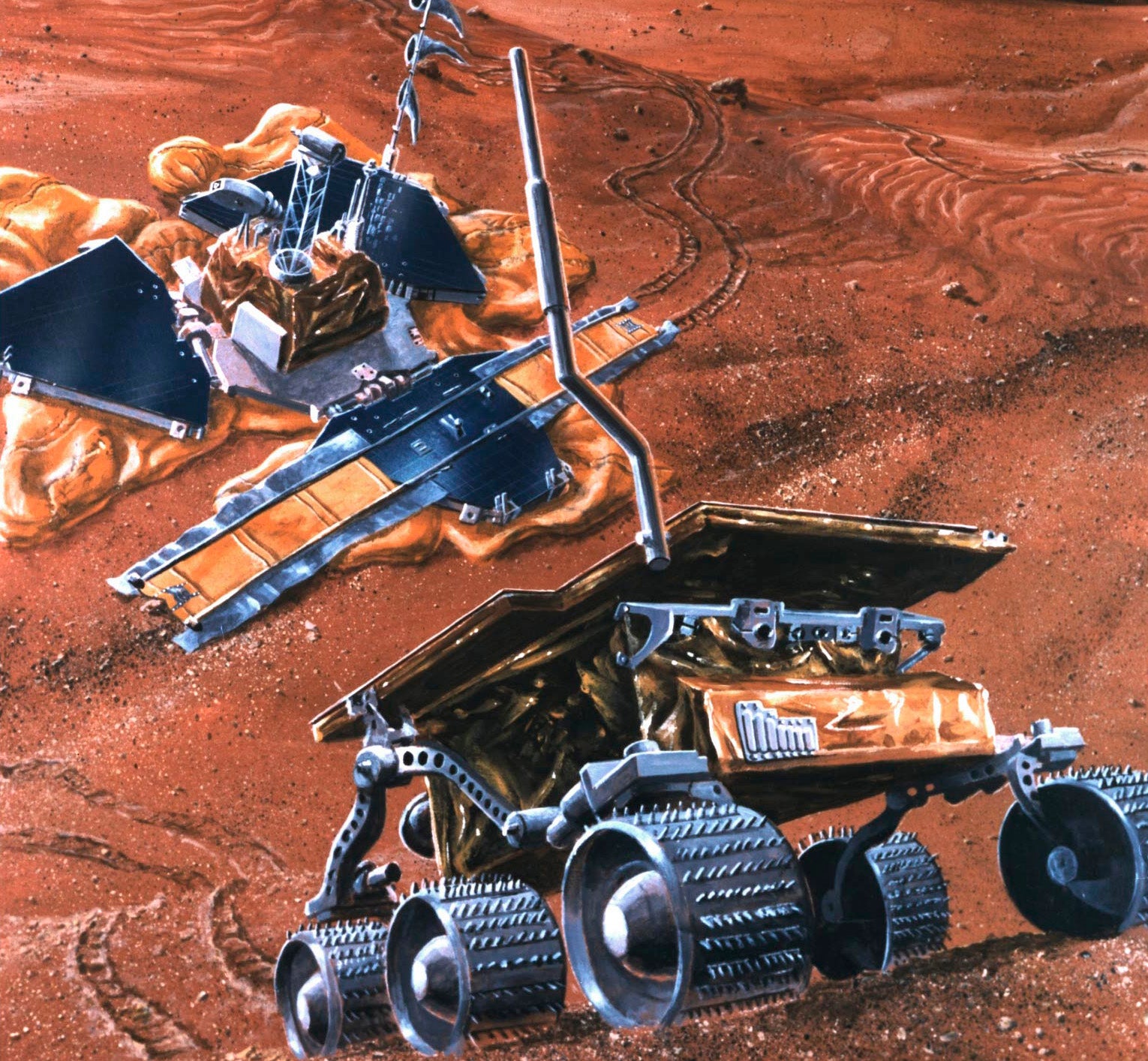
However, Sojourner’s most striking feature was its flat top covered in metallic-blue solar panels, which made the rover look like a giant beetle; and its six small, spiky wheels, which gave the rover real Robot Wars appeal.
Since nothing in this mission had ever been tried before, hopes weren’t sky high that Sojourner would work. Many mission scientists thought that if it did work, it wouldn’t function long and the rover would die after driving a few dozen yards over about seven martian days (or sols) — after all, that was its planned mission length. But after it safely touched down on the Red Planet’s surface on July 4, 1997, Sojourner exceeded all expectations, lasting more than 10 times as long as intended.
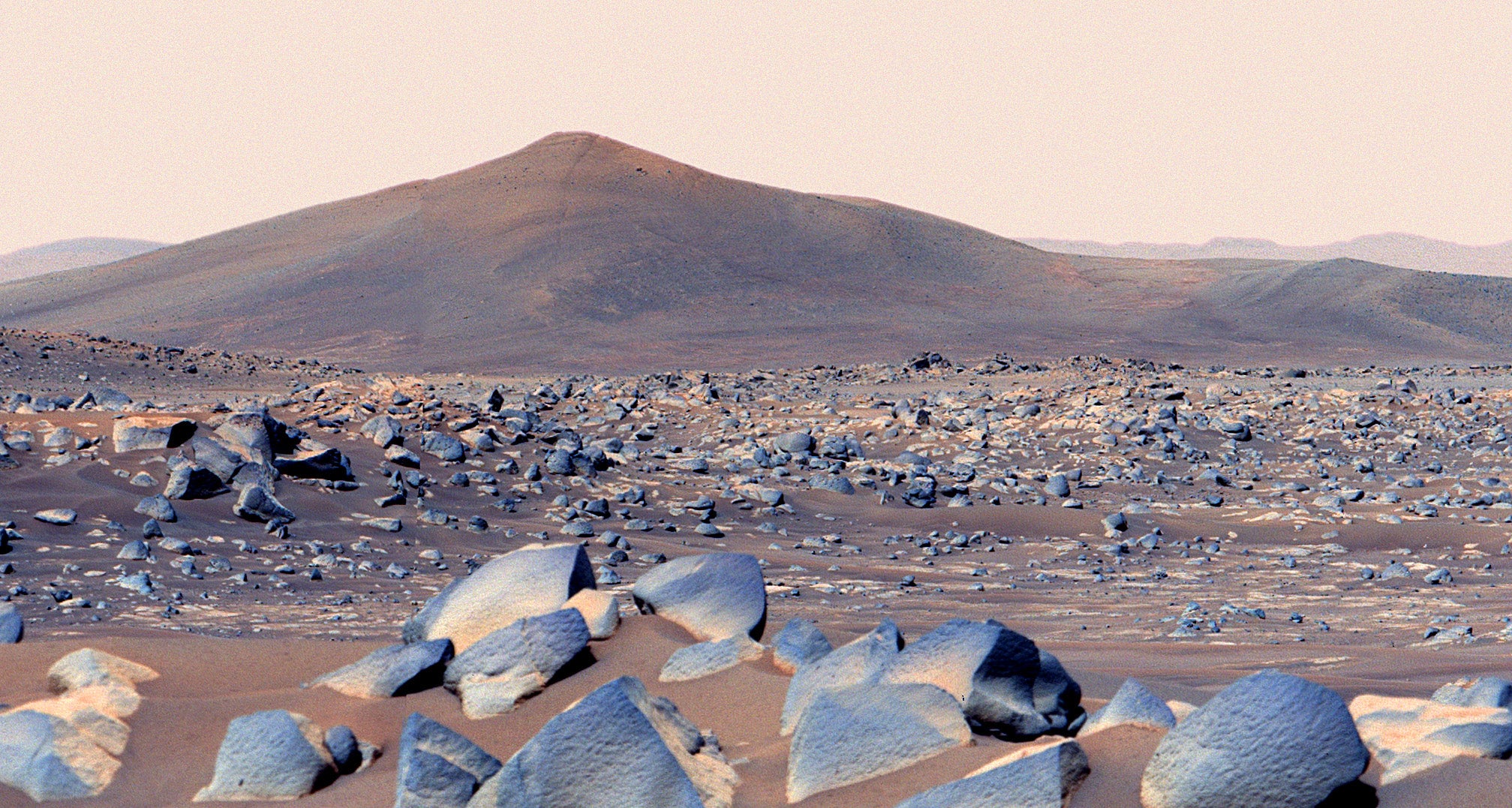
The Mars Pathfinder lander set down in an area called Ares Vallis — which, by the way, is nowhere near and looks absolutely nothing like the place Watney digs the rover out of in The Martian. Ares Vallis is essentially the dried-up remains of a huge channel carved into the martian surface by violent floods billions of years ago.
When Pathfinder’s first images came back, they showed an orange-brown landscape strewn with boulders, some of which were quite large and almost all of which bore signs of tumbling, cracking, and splitting by floods that once swept down the valley. Those images caused a sensation partly because Pathfinder was one of the first real space missions of the internet age. When NASA began posting images daily, there was so much interest in them that the fledgling internet strained under the pressure. People around the world viewed and downloaded the images as soon as they appeared, giving the mission an incredible public profile and showing that there was a huge appetite for “live” images sent back from distant worlds.
Many space enthusiasts who download raw images sent back by Curiosity and Perseverance to create beautiful panoramas and landscapes — including myself — first got into image processing because of those early Sojourner photos.
Rover images, then and now
Sojourner’s images were an absolute sensation at the time. They looked so crisp and clear that people felt like they were transported to Mars just by looking at them. Not surprisingly, Sojourner’s shots are small and extremely low resolution compared with images sent back by more modern rovers. Images from Curiosity and Perseverance are vastly superior in quality, each one many megabytes in size. And yet those grainy, distorted views captured by Sojourner still hold up today as beautiful postcards from a robot sightseer lumbering around an alien world.
Rover results
Sojourner visited and imaged numerous fascinating rocks, many of which were given quirky nicknames by the mission team. Yogi was so named because it looked like the head of a bear, kind of; it had neighbors such as Pop Tart and Barnacle Bill. Two hills on the horizon were imaginatively named Twin Peaks, and a wind-carved dust dune close to the landing site was christened Mermaid Dune.
Although Sojourner’s science instruments were limited in their capabilities compared with modern Mars laboratories, they still revealed a lot about the Red Planet, and the data they gathered are still useful today. The rover confirmed the mission team’s predictions — and hopes — that the landing site was covered with a rich variety of rocks, brought there by ancient floods. Some rocks, like Yogi, were volcanic in origin, while others had been shaped and sculpted by Mars’ gentle but relentless wind. Still others must have been formed in the presence of liquid water. The rover also confirmed that Ares Vallis once was a flood channel, and it took images of dust dunes between the rocks there.
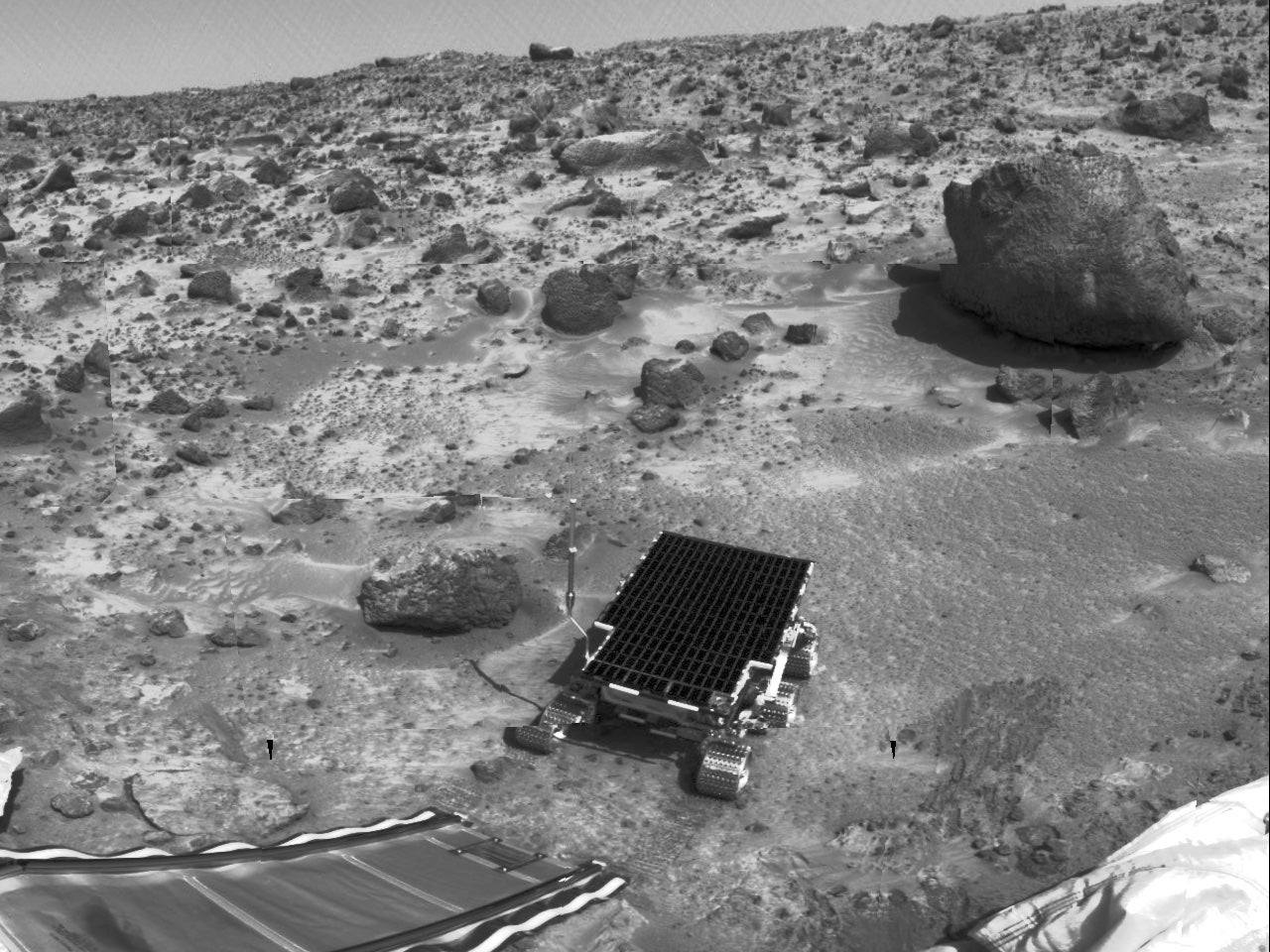
Despite the valuable science revealed by many of the images Sojourner took, some of the most enduring shots were of the rover itself, taken by Pathfinder. A camera mounted on a tall mast on the lander took many fantastic images showing the rover passing between rocks, sniffing the soil with its spectrometer nose. Compared to the ultra-high-resolution images now being sent back by Perseverance, these photos were little more than snapshots taken by a disposable camera. But there’s still a charm about them that more modern images don’t quite possess.
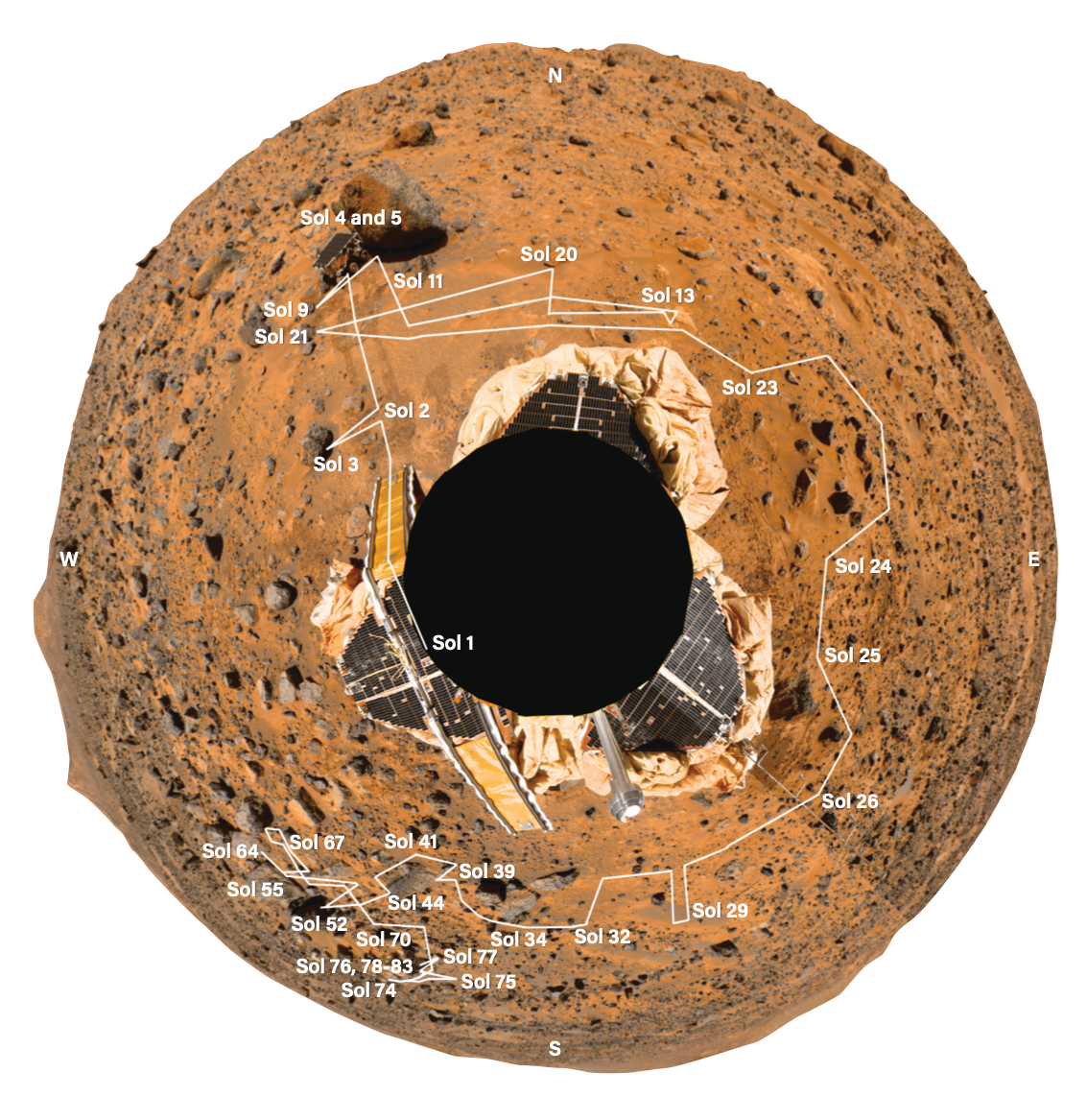
Sojourner survived for 83 sols on Mars, and in that time it drove a distance of nearly 330 feet (100 meters). At no point did it stray too far from the Pathfinder lander, which served as a relay station for signals coming from and being sent to Earth. Although crude compared to even the lowest-quality cameras carried by Curiosity and Perseverance, Pathfinder’s cams were still quite capable. Using their close-up lenses, zoom functions, and multiple color filters, they, too, collected a wealth of data. Pathfinder also served as a martian “weather station,” taking measurements on the wind, temperature, and air pressure at the surface.
Perhaps most importantly, the Pathfinder mission and Sojourner proved it was possible to land and operate a rover on Mars. Everything worked. The airbags inflated and protected the pair as they bounced and boinged across the rocky martian surface. Sojourner rolled down its ramp and drove freely across the ground independently, not connected to Pathfinder by any tethers or electrical cables. And both the rover and lander went on to conduct valuable science, relaying images and data back to scientists on Earth — data that have been pored over for 26 years.
Honoring the past
It’s hard to pin down Sojourner’s final resting place. Although the rover was last seen in Pathfinder images located 43 feet (13 m) away, Sojourner kept driving after that. In December 2006, the Mars Reconnaissance Orbiter’s HiRISE camera snapped high-resolution images of Pathfinder’s landing site. The images showed the lander and its surroundings, as well as a cluster of pixels that could be Sojourner — but it also might be a pile of rocks. The images also showed something about 20 feet (6 m) away from Pathfinder, but it is not clear exactly what it is. Perhaps Sojourner did reach Pathfinder’s side and stayed there like a loyal friend until seeing its final sunrise. Unfortunately, we may never know — at least not until human explorers visit the area, if they ever do.
Sojourner has largely passed out of the general public’s memory, but it left an indelible imprint on NASA and those who work there, and it paved the way for all the rovers that followed. While building Perseverance, engineers fitted a long, dark plaque on its chassis. It was engraved with the silhouettes of the rovers that traversed Mars before it. Behind Perseverance is Curiosity, then Spirit and Opportunity. And at the very start of the line, paving the way for them all, is Sojourner.
Almost famous
Sojourner may have been the first rover to rove on Mars, but a quarter of a century earlier, the Soviet Union sent the very first rovers to the Red Planet as part of the Mars 2 and Mars 3 missions.
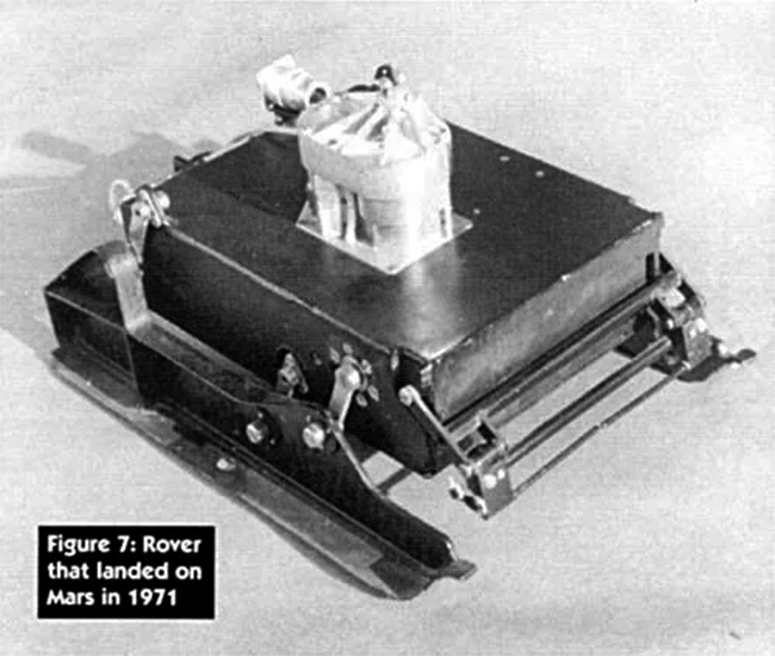
These ProP-M “nano-rovers” didn’t look like rovers as we think of them today. They were tiny, around the size of a large hardcover book, and weighed barely 10 pounds (5 kilograms). Essentially just small, square boxes with wide, flat skis instead of wheels, they were meant to be lowered from the landers, attached to the end of spindly, 6-foot-long (1.8 m) robot arms. The rovers would move around the landers at a tortoiselike top speed of 3 feet (1 meter) per hour, still attached to a 50-foot (15 m) tether.
Unfortunately, neither rover was successful. The first was destroyed when Mars 2 crash-landed Nov. 27, 1971. A month later, Mars 3 reached the surface intact, but it stopped talking to Earth less than two minutes after landing, so it never fully deployed its rover.
Future martian archaeologists may one day find the ProP-M dangling on the end of the lander’s robot arm, just a few frustrating feet above the rocks and dust it was supposed to skitter across.