Key Takeaways:
- The Tumbleweed Mars rover, a spherical robot propelled by martian winds, has successfully passed crucial technical tests, validating its potential for low-cost, large-scale exploration and a swarm deployment on Mars by 2034.
- Recent wind-tunnel testing at Aarhus University’s Planetary Environment Facility and field campaigns confirmed the prototypes can traverse Mars-like terrain, demonstrating mobility at wind speeds of 9-10 meters per second and an ability to climb approximately 30-degree slopes under simulated martian atmospheric conditions.
- These 5-meter diameter rovers, featuring solar-powered sails and collapsibility for transport, are designed for deployment over martian poles, utilizing the planet’s Hadley cell circulation to propel them towards the equator, ultimately forming a distributed network of stationary measurement stations.
- The mission aims to map martian habitability by identifying areas with magnetic fields, low radiation, and underground water using onboard instruments, representing a paradigm shift toward resilient, mass-producible exploration models for continuous, ground-level data collection.
What does the next generation of martian exploration look like? The answer, quite literally, is blowing in the wind. The Tumbleweed Mars rover, a spherical robot designed to roll across the martian surface, driven by the martian wind, has passed crucial technical tests, validating its potential for low-cost, large-scale exploration.
The concept, developed by Team Tumbleweed (supported by the European Space Agency [ESA] Business Incubation Centre), aims to deploy a swarm of the tumbling laboratories on the Red Planet by 2034, offering a resilient and wide-ranging alternative to traditional rovers. Recent tests at Aarhus University’s Planetary Environment Facility and fieldwork in a Netherlands quarry confirmed the prototypes can traverse Mars-like terrain. These results, presented at the EPSC-DPS 2025 meeting — a joint meeting of the Europlanet Science Congress and American Astronomical Society’s Division for Planetary Sciences — confirm the technical feasibility of this ambitious, swarm-based mission, which promises to fill the gap between orbiters and rovers.
“Recent wind-tunnel and field campaigns have been a turning point in the Tumbleweed rover’s development. We now have experimental validation that Tumbleweed rovers could indeed operate and collect scientific data on Mars,” said James Kingsnorth, head of science at Team Tumbleweed, in a Sept. 25 press release.
The next-generation rover concept
The Tumbleweed rover is a 16.4-foot-diameter (5 meters) sphere, utilizing six tetrahedrally arranged sails. These sails host solar cells to power the onboard electronics and recharge batteries for nighttime operation. To accommodate transport, the massive rovers can be collapsed into discs, reducing the payload space required on a rocket and helping them decelerate in their descent toward the martian surface as they unfold midair after being deployed.
Martian wind, though still poorly understood, appears to be simpler and more predictable than on Earth, based on current scientific understanding. The rovers will be deployed in swarms over the martian poles and blown towards the equator, taking advantage of the planet’s Hadley cell circulation: As on Earth, warm air rises over the equator, moves toward the poles, cools, and then flows back toward the equator on the surface. There is some complication caused by the Red Planet’s spinning and occasional storms, but in theory, the wind is consistent enough to blow the rovers in the general direction of the equator.
The rover swarm will map its entire journey, pinpointing areas of martian habitability — places that could support life or future human bases. This involves using instruments like cameras, neutron spectrometers, and magnetometers to search for areas with magnetic fields, low radiation, and signs of underground water. The final mission phase involves the rovers collapsing into stationary measurement stations, creating a long-term, distributed network of sensors across the surface. This modular, mass-producible design aims to bring the CubeSat concept (a standard for tiny, inexpensive satellites built from modular components) to Mars, although Team Tumbleweed has not publicly specified the cost of producing the rover.
The Tumbleweed concept has been explored for decades, notably by NASA’s JPL, which successfully tested a 6-foot-diameter (1.8 m) prototype during a 40-mile (64.4 kilometers) wind-driven trek across Antarctica in 2004. Building upon this legacy, the current Team Tumbleweed project, founded in January 2017, quickly evolved, progressing through several prototype stages, including field tests in Oman and the Negev deserts, and gained international backing as an incubatee of the ESA Business Incubation Centre Austria. The ultimate goal is a mission to Mars in 2034, when up to 90 Tumbleweed rovers are projected to begin their pioneering exploration. But first, they have to prove the technology works reliably under simulated martian conditions.
Validation in Mars-like environments

To move the technology from laboratory proof-of-concept to a flight-ready platform, Team Tumbleweed recently executed two critical testing phases. In a field test in Maastricht, Netherlands, a 8.8-foot-diameter (2.7 m) Tumbleweed Science Testbed prototype successfully collected and processed data using off-the-shelf sensors while actively tumbling over natural, uneven terrain.
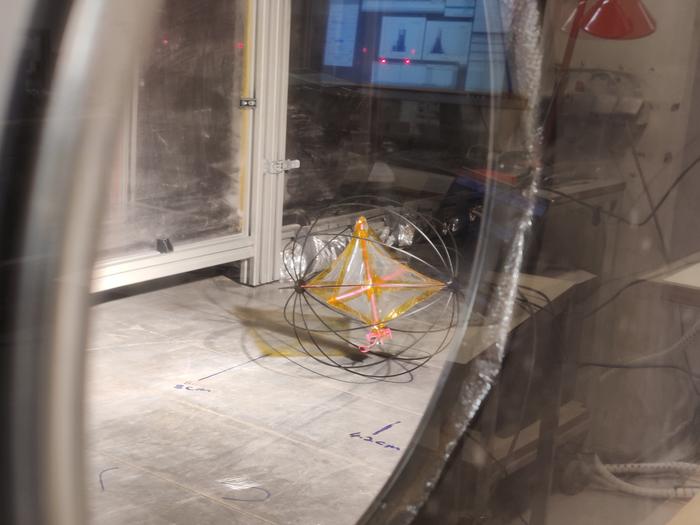
The most recent testing took place at Aarhus University’s Planetary Environment Facility. Scaled prototypes measuring 11.8, 15.7, and 19.7 inches (30, 40, and 50 centimeters) in diameter were subjected to static and dynamic tests in a wind tunnel replicating Mars-like conditions, including a low atmospheric pressure of 17 millibars. Results presented at the EPSC-DPS 2025 meeting confirmed that wind speeds of just 9 to 10 meters per second (or 32.4 to 36 km/h [20 to 22 mph]) were sufficient to set the rover in motion across various Mars-like surfaces, including sand, pebbles, and rough regolith. Furthermore, the prototypes demonstrated the ability to climb slopes equivalent to approximately 30 degrees on the martian surface.
Near-surface winds on Mars are frequent and powerful enough to propel the rovers. “Data from Insight suggests that in Mars’s northern hemisphere during summer, daytime wind speeds are characterised by a wide distribution and are positively skewed toward higher wind speeds of around 10 metres [32.8 feet] per second, and while the nights are calmer, speeds of more 10 metres per second can sometimes be reached,” said Mário João Carvalho de Pinto Balsemão, Team Tumbleweed’s mission scientist, in the press release. With these wind speeds, the team predicts the average Tumbleweed could travel 262 miles (422 km) over 100 martian sols (the martian day, approximately 24.6 hours) at an average overall speed of 0.22 mph (0.36 km/h); slow rolling to be sure. In favorable conditions, the maximum predicted range could be as high as 1,740 miles (2,800 km).
Shifting the exploration paradigm
The Tumbleweed concept joins a new wave of exploration models, moving beyond the high-cost, high-risk single-unit approach of traditional wheeled rovers like Perseverance. Another emerging concept is “Skyfall,” which proposes a swarm of autonomous drones that deploy midair to scout vast regions. While both Tumbleweed and Skyfall offer cost advantages and rapid coverage compared to traditional rovers, they fulfill distinct, complementary roles. Skyfall prioritizes aerial mapping to quickly identify future human landing sites and resources like water ice. In contrast, the Tumbleweed’s continuous, ground-level rolling is suited to collect long-term data on radiation, magnetic fields, and water before forming a permanent sensor network.
The successful testing campaign confirms that low-cost, large-scale martian exploration is now feasible. The immediate focus is on refining the Tumbleweed Science Testbed, including integrating payloads like radiation sensors, soil probes, and dust sensors. These developments will be tested during a field campaign in Chile’s Atacama Desert in November 2025.