Finally, after years of planning and failed attempts, a spacecraft touches down safely on the desolate alien landscape. The lander surveys its surrounding terrain and deploys a ramp to guide its payload onto the surface. Slowly, a set of wheels, solar panels, and scientific instruments unfold and lock into place, and a robotic vehicle lumbers hesitatingly down the ramp. Its wheels at last on the dusty surface, the rover begins exploring its extraterrestrial home. To the delighted surprise of project engineers and scientists, the rover lasts well beyond its life expectancy of 3 months and continues to wheel around for almost a year.
This scenario may sound like the ongoing exploits of Spirit and Opportunity on the Red Planet today, but, in fact, it played out over 30 years ago much closer to home, on Earth’s Moon. On November 17, 1970, the Russian-made Lunokhod 1 became the first robotic rover ever to leave the bonds of Earth and explore another world. More than 3 decades later, its legacy continues in new generations of roving vehicles.
Lunokhod 1 was part of the Soviet empire’s last-ditch effort to take back some of the glory it lost to the immensely successful American Apollo program. Luna 15 blasted off July 13, 1969, with an ambitious mission to land an unmanned rover on the Moon and return soil samples. Luna 15 beat Apollo 11 into lunar orbit by 48 hours, operating successfully for 52 orbits, but it crashed onto the lunar surface the day after Armstrong and Collins set down on the Sea of Tranquility.
Having lost the race to the Moon, the Russians set out to prove their robot technology could match the science any astronaut could do on the lunar surface. Luna 16 touched down on Mare Fecunditatis (the Sea of Fertility) September 20, 1970, about 60 hours after local sunset — the first lunar night-landing. Just 26 hours after arriving, Luna 16 had drilled into the lunar soil, retrieved a 13.7-inch-long (35 centimeters), 3.6-ounce (101 grams) geological sample, stowed it in a return capsule, and launched it toward Earth. The sample arrived September 24, floating on parachutes to a gentle touchdown in Kazakhstan. In the shadow of the successful manned U.S. Apollo 11 and 12 Moon missions, Soviet scientists had collected their first lunar sample — and they did it with a robot.
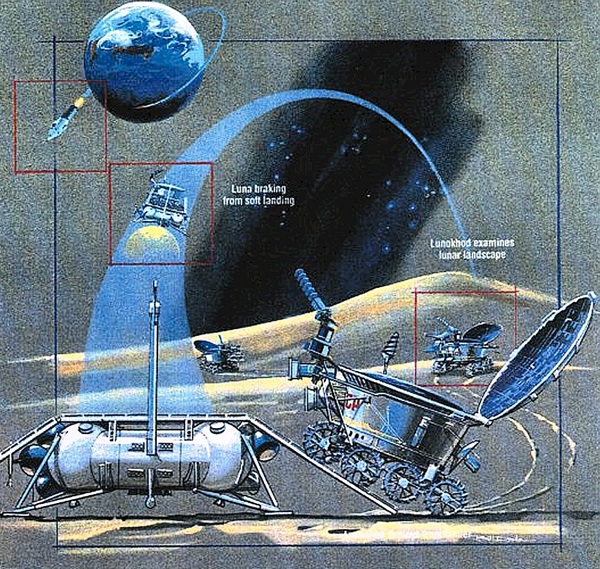
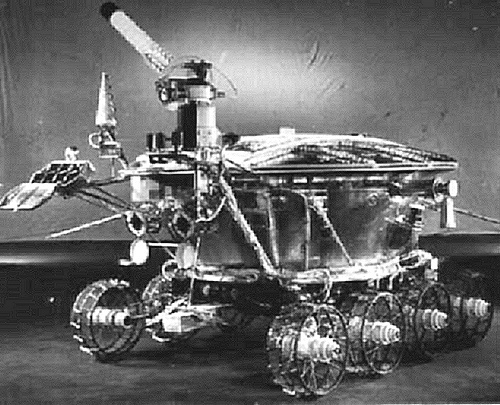
The next step was a mobile laboratory, a robotic rover. Luna 17 left Earth November 10, 1970, carrying a vehicle named Lunokhod 1 and landed safely at Mare Imbrium (the Sea of Rains), one week later. Just like today’s martian rovers, Lunokhod 1 was designed to unlock geologic mysteries, and Soviet scientists outfitted the rover with similar, albeit more primitive, equipment. Lunokhod carried an X-ray spectrometer, instruments to analyze soil density and composition, and a suite of television cameras.
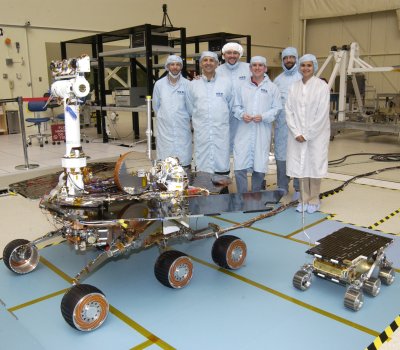
Weighing 1,667 pounds (756 kilograms) and about the size of a breakfast table, Lunokhod 1 was quite large even by today’s standards. Little Sojourner, the Mars Pathfinder rover, was the size of a small microwave oven and weighed only 23 pounds (10.5 kg), while twin golf-cart-size Mars Exploration Rovers (MER) Spirit and Opportunity weigh about 408 pounds (185 kg) each. As with its modern robotic cousins, an array of solar cells powered Lunokhod during the day, but the vehicle also used a radioactive heat source to warm it during the bitter-cold lunar night.
Comparing the Lunokhods to their modern-day descendants is a bit unfair. “The Lunokhods had no autonomous behavior and were joystick-operated from Earth,” says Randel Lindemann, lead mechanical engineer for Spirit and Opportunity. Another big difference lies in the radio time delay for communication between Earth, Moon, and Mars. “Where the Lunokhods were simply teleoperated, we can’t do that with Mars at all,” Lindemann explains. “Instead of being a bit more than a few seconds delay, like it is to the Moon, it’s 20-plus minutes to Mars, so there’s no way that we can do ‘joysticking.'”
Another then-and-now difference was more fundamental. “Rather than design fancy hardware for the vacuum of space and extreme cold, which would allow you to make things smaller and use less power, the Russians used more off-the-shelf equipment and put it in pressure vessels that would mimic Earth environments,” Lindemann says. The Russians had more powerful rockets early in the race to the Moon, an advantage that offset the additional mass required by non-specialized equipment.
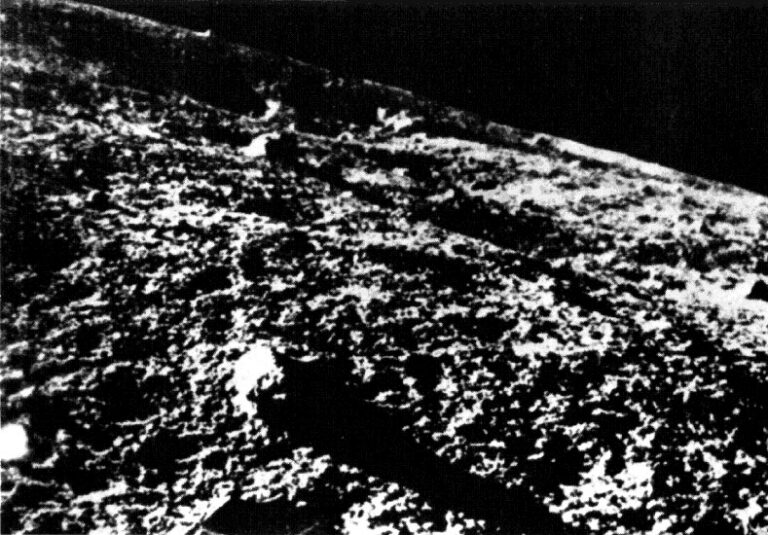
Climbing in and out of craters and trenches, examining rocks and soil, the eight-wheel Lunokhod spent an unprecedented 11 months functioning on the lunar surface. By the time Lunokhod was officially shut down October 4, 1971 — the anniversary of Sputnik’s launch — the “Moon buggy” had set the bar high. Lunokhod traveled 6.5 miles (10.5 kilometers), transmitted more than 20,000 television pictures, and conducted more than 500 lunar soil tests. Two years later, a larger and faster Lunokhod 2 rover successfully landed in Mare Serenitatis and set a still-unbroken record for extraterrestrial driving distance: 23 miles (37 km).
With the end of the space race and continuation of the Cold War, plans for expanding lunar exploration were put on hold indefinitely. The world would not see another rover mission until Mars Pathfinder delivered Sojourner to Ares Vallis July 1997.
Why did it take more than 2 decades to send rovers back into the solar system? Matt Golombek, chief scientist on the Pathfinder and MER Missions, believes the answer simply comes down to shrinking the size of the required technology.
While engineers on Earth upload daily sets of commands for Spirit and Opportunity, each rover is truly robotic. The rovers contain enough onboard memory and computing power that they can perform their own hazard avoidance — the primary task for Russian controlling Lunokhod.
“Back in the 1970s and 1980s, we used so much computing power that you would end up having a rover the size of a truck, and that’s not going to do on a reduced mission like Pathfinder or MER,” Golombek says. “So we had to wait until computers were small enough and had enough processing speed.” Thanks to technological advances that simply didn’t exist 10 years ago, JPL engineers can safely pilot the rovers despite being separated by hundreds of millions of miles.

The success of Spirit and Opportunity means the future of extraterrestrial rovers is certain. NASA’s 2009 Mars Science Laboratory will be the size of a compact car and fueled by nuclear power. It will be capable of traversing hundreds of kilometers over the martian desert while carrying out a complete array of tests for water and life. “It will be able go substantially farther and last years on the surface, far beyond what MER can ever do,” Golombek says.
Lessons learned from Lunokhod have less to do with technology and science than the philosophy behind these pioneering unmanned missions. “I think we’ve learned a lot when it comes to the importance of mobility of a science platform on another planet, especially where you just can’t afford the magnitude of a manned mission,” Lindemann notes. “Rover missions are an extremely effective way to do great science on far-off worlds.”
It’s not hard to imagine that rovers will play an integral part in our exploration of the solar system for decades to come, as they continue to extend our human senses beyond Earth. Rovers might even find their way onto moons of the solar system, such as Europa or Titan, to search for pre-biotic chemicals. “Mobility gives missions the ability to become a robotic field geologist and remains the key to missions on places where there is a hard surface to land on, like Mars or the moons of Jupiter and Saturn,” insists Golombek.
The rovers built by today’s generation of engineers and scientists are smarter, tougher, and more capable robots. Prototypes now are being readied to conquer the solar system by negotiating some of Earth’s most inhospitable regions, such as Antarctica and Chile’s Atacama Desert. Rovers are now technologically and mechanically ready to explore places scientists think hold answers to some of the cosmos’ most important questions.
“We already have some incredibly compelling information from Mars that it had a watery past, thanks to the rovers,” Lindemann says. He argues that such pathfinding missions make more complex missions not just possible, but mandatory. “If we’ve got to know, we’ve got to go.”